本文尚未完成,但近期不会补充完整。
这里记录一下还需要写的部分:
- 论文方法部分尚未完成
- 实验结果与分析
- 复现(如果可以的话,项目组里有学长指出研究附带的Github仓库中,代码并不完整,复现可能有困难)
在刚接触气象领域研究时,学长推荐我阅读《DiffCast: A Unified Framework via Residual Diffusion for Precipitation Nowcasting》这篇论文,说可以参考学习扩散模型如何应用在气象领域,解决短临降水问题。
学长自己的研究中,曾经将 DiffCast 作为Baseline之一(据他自己说,效果不够好hh)。我们现在手上的工作也是扩散模型相关,因此阅读这篇论文还是很有必要的。
相关知识铺垫
短临降水问题定义
我们来看看文章如何定义短临降水问题:
短临降水问题可以表述为一个时空预测问题(Spatio-temporal prediction problem),基于当前的观测数据,预测未来很短时间范围内(0~6h)的高时空分辨率降雨情况
-
输入:$L_{in}$ 帧初始雷达回波图像序列 $x=[x_i]^0_{i=-L_{in}} \in \mathbb{R}^{L_{in} \times H \times W \times C}$
-
输出:未来 $L_{out}$ 帧序列 $y=[y_i]^{L_{out}}_{i=1} \in \mathbb{R}^{L_{out} \times H \times W \times C}$
-
数学本质:建模条件概率分布 $p(y|x)$
翻译一下,这个公式表示 ”在已知 $x$ 的条件下,$y$ 发生的概率分布“。
我们预测的不是唯一的结果,而是要所有未来情况的发生概率。
短临降水问题不仅仅是“预测下一帧图像”,而是一个需要同时解耦并建模“全局确定性运动”与“局部随机残差”的复杂时空演化问题。
扩散模型
扩散模型(DDPM)主要包含两个过程:
-
前向扩散(Forward Diffusion)
给定一个清晰图像 $x_0$,在 $T$ 步内逐步加入高斯噪声,得到 $x_1,x_2,\dots,x_T$ 。到了 $x_T$ ,图像就变成了纯高斯噪声。
-
逆向去噪(Reverse Denoising)
我们希望训练一个神经网络,参数是 $\theta$ 。
它的任务是:给定第 $t$ 步的噪声图 $x_t$ 和时间步 $t$ ,预测出第 $t-1$ 步稍微清晰一点的图 $x_{t-1}$
有时间会补充对扩散过程完整的数学定义,或者另起一个博客(Transformer + 扩散模型:DiT 入门)
那么具体的训练目标是什么呢?论文采用了简化的损失函数,让网络预测加入的噪声 $\epsilon$ 。
可以这样理解扩散模型的工作流程:
我们故意在图里加入噪声,让神经网络学习去猜我们加入了多少噪声。
猜得越准,说明神经网络越有能力把噪声去掉。
这样,模型就可以从噪声中还原出我们想要的东西。
值得一提的是,DiffCast 并不是用扩散模型直接生成降水数据,而是预测 ”残差“,这个思想在我们的研究中同样也有参考,后面会详细阐述。
论文方法
Diffcast 旨在将降水系统分解为全局运动趋势(global motion trend)和局部随机残差(local stochastic residual)( $y$ 表示未来降水),
$$ y=\underbrace{\mu}_{\text{全局运动趋势}}+\underbrace{r}_{\text{局部随机残差}} $$并分别用确定性组件(deterministic component)与随机扩散组件(stochastic diffusion component)进行建模。
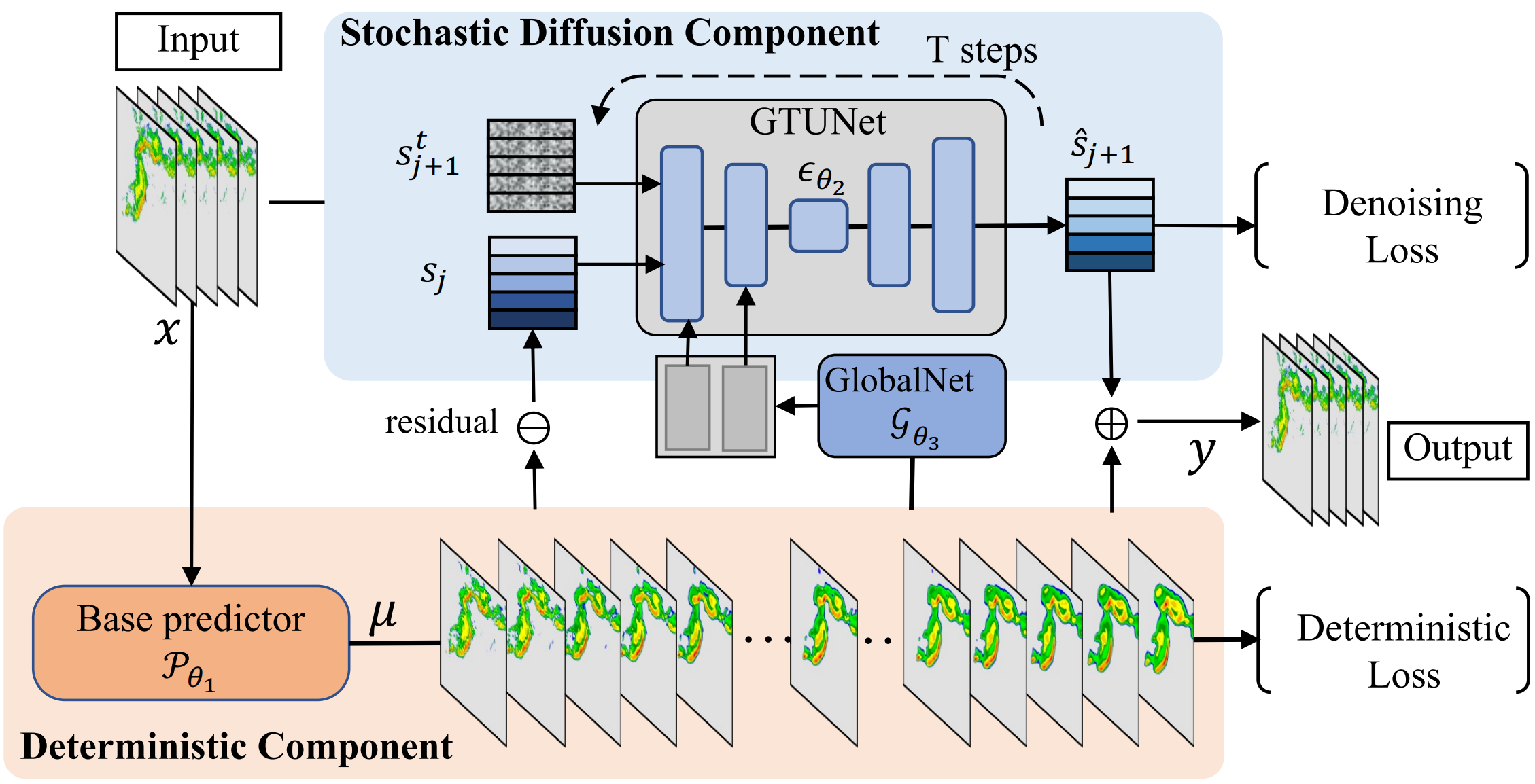
确定性组件(下方橙色):
输入历史帧 $x$,通过 Base predictor $\mathcal{P}_{\theta_1}$ 生成全局运动趋势 $\mu$
粗预报,捕捉云系整体移动但模糊
随机扩散组件(上方蓝色):
计算残差 $r=y-\mu$ (真实值与趋势的偏差),通过 GTUNet(包含 GlobalNet 提取全局运动先验)对残差进行扩散建模,生成局部随机细节 $\hat{s}$
输出:最终预测 $\hat{y}=\mu+\hat{s}$(趋势 + 残差修正)
文章提到,两个组件以端到端方式同步训练,自然地相互协作。
端到端(End-to-End),多个组件同时、联合训练,而不是分阶段各自独立训练。
确定性预测骨干
这是一个通用模块,确定性组件允许采用任何确定性预测模型作为基础预测器 $\mathcal{P}_{\theta_1}(\cdot)$ ,无需额外配置
我们把基础预测器的输出记为 $\mu=[\mu_i]^{L_{out}}_{i=1} \in \mathbb{R}^{L_{out}\times H \times W \times C}$
通过给定输入帧 $x$ ,利用任意像素级损失来建模学习 $p_{\theta_1}(\mu|x)$ ,比如 MSE:
$$ \mathcal{L}_\mathcal{P}=\mathbb{E}[\lVert \mu-y \rVert^2] $$或其他原生设计的损失函数,可以跟着预测模型本身调整。$\theta_1$ 表示该部分的参数。我们称这部分损失为确定性损失(deterministic loss)。
对然这种方式得到的预测 $\mu$ 存在模糊(blurry)和高值回波衰减(high-value echoes fading away)问题,但能够捕捉全局运动趋势,有助于后续解耦局部随机残差。$\mu$ 本身也会为扩散组件提供必要信息。
这里提到的模糊与高值回波衰减问题,是深度学习确定性预测的固有缺陷。
模糊——边缘变糊了
历史帧的强对流中心边界锐利清晰,而预测出来的降水区域像被高斯模糊过。
这是因为 MSE 存在 “平均效应”,模型会倾向于预测周围像素的平均值,这会导致位置偏移一点,而不至于惩罚太大。
最终导致锐利的雨带边缘被“涂抹”成渐变,失去细节纹理。
高值回波衰减——暴雨变小雨
真实观测到暴雨,而预测未来变为中雨甚至消失。
实际上云团只是移动,强度并未快速衰减,但模型预测其消失。
导致这种情况有多种原因:
数据不平衡:数据集暴雨占比少,模型没学会维持强对流
MSE 的保守偏见:预测小雨虽然不准确,但模型受到惩罚的风险小,导致模型低估极端值
时间漂移累积:多步预测时,每一步的小衰减会累积,导致长时效预测强降水消失
而这些缺陷正是随机扩散组件要修正的。
随机残差预测
关于局部随机性,我们计算真实值 $y$ 与 $\mu$ 的残差$r$ 来表征,也就是:
$$ r=y-\mu $$但未来降水的真实值 $y$ 未知,因此 $r$ 无法直接预测。
DiffCast 训练扩散模型来预测残差的演化 。由于 $r$ 表示从 $1$ 到 $L_{out}$ 的序列,我们以自回归方式对其演化进行建模,扩散模型需要建立分布:
$$ p_{\theta_2}(r_i \mid \hat{r}_{i-1}) $$其中 $\hat{r}_{i-1}$ 表示第 $i-1$ 帧的预测残差,$\theta_2$ 为扩散模型参数。
自回归方式(autoregressive manner)用前一刻的预测结果,作为下一刻预测的输入。
这里表示我们预测第 $i$ 帧残差时,模型不仅会看历史观测,还会看预测的第 $i-1$ 帧残差。
假设我们使用 $T$ 步去噪扩散建模该分布。前面我们提到过扩散模型的反向去噪过程:
$$ p_\theta(y^{t-1} \mid y^t)=\mathcal{N}(y^{t-1};\mu_\theta(y^t,t),\sigma^2_tI) $$应用到残差预测的场景,有公式:
$$ p_{\theta_2}(r^{0:T}_i \mid \hat{r}_{i-1})=p(r^T)\prod_{t=1}^{T}p_{\theta_2}(r^{t-1}_i \mid r^t_i,\hat{r}_{i-1}) $$其中 $r^T \sim \mathcal{N}(0,I)$ ,$t$ 为去噪步;$r^t_i$ 表示第 $i$ 帧残差的第 $t$ 个去噪状态。
这里容易混淆时间帧 $i$ 与去噪步 $t$
-
时间帧:上述公式中 $r$ 的下标,描述的是降水的时间点,一帧对应一个时刻。
范围是 $[-L_{in}, \dots, 0,1,2,\dots,L_{out}]$ ,其中 $[1,\dots,L_{out}]$ 是需要预测的未来时间帧。
预测第 i 帧降水时,会参考 i-1 帧,也就是之前时间点的降水。
-
去噪步:$r$ 的上标,描述的是扩散模型的反向过程中的去噪状态。
范围是 $[1,2,\dots,T]$。反向过程学习去噪,去噪步从大到小,图像越来越清晰,最后生成目标图像。
反向去噪过程中,从公式上看,我们需要训练神经网络学习预测 $\mu_\theta$ 。经过数学推导,我们可以得到均值预测公式:
$$ \mu_\theta(y^t,t)=\frac{1}{\sqrt{\alpha_t}}(y^t-\frac{\beta_t}{\sqrt{1-\overline{\alpha}_t}} \epsilon_\theta(y^t,t) $$根据这个公式,我们可以把优化目标从均值预测转变为噪声估计。也就是说,去噪过程中,从状态 $r^t_i$ 恢复状态 $r^{t-1}_i$ 等价于估计第 $t$ 步加入的噪声 $\epsilon$ 。
我们假设扩散过程中每一步的去噪函数为:$\epsilon_{\theta_2}(r^t_i,\hat{r}_{i-1},t)$ ,输入包括先前扩散状态 $r^t_i$ 和最近预测残差 $\hat{r}_{i-1}$ 为输入。
最后得到的目标函数为:
$$ \mathcal{L}_\epsilon=\mathbb{E}_{(r_{i},r_{i-1}) \sim r, t, \epsilon \sim \mathcal{N}(0,I)} \lVert \epsilon - \epsilon_{\theta_2}(r^t_i,\hat{r}_{i-1},t) \rVert^2 $$其中第 $t$ 个去噪状态可以计算为:
$$ r^t_i=\sqrt{\overline{\alpha}_t}({\underbrace{y-\mathcal{P}_{\theta_1}(x))_i}_{\text{残差}}}+\sqrt{1-\overline{\alpha}_t}\epsilon $$我们称这个目标函数为去噪损失(denoising loss)
就像前面说的,作者用端到端方式训练框架,采用如下联合损失函数:
$$ \mathcal{L}=\alpha\sum_{r_i \in r}\mathcal{L}_\epsilon(r_i)+(1-\alpha)\mathcal{L}_\mathcal{P} $$其中 $\alpha \in [0,1]$ 为平衡两个损失的权重因子。
训练完成后,我们可以通过先前残差 $\hat{r}_{i-1}$ ,从高斯噪声开始迭代去噪来预测 $r_i$,公式如下:
$$ y^{t-1}=\frac{1}{\sqrt{\alpha_t}}(y^t-\frac{\beta_t}{\sqrt{1-\overline{\alpha}_t}}\epsilon_\theta(y^t,t))+\sigma_t\epsilon $$重复此过程 $L_{out}$ 次,得到估计的残差序列 $\hat{r}=[\hat{r}_i]^{L_{out}}_{i=1}$ 。
注意,文章中设置 $\hat{r}_0=0$ 。这里可能会令人困惑,我们来解释一下。
我们预测未来的残差,以未来第1帧为例,记为 $\hat{r}_1$ 。根据前文所说,我们希望模型建立分布:$p_{\theta_2}(r_i \mid \hat{r}_{i-1})$ ,即 $p_{\theta_2}(r_1 \mid \hat{r}_0)$ 。
也就是说,我们预测第1帧时,依赖于第0帧的预测结果。但未来第0帧这种概念是不存在的,所以我们人为设置 $\hat{r}_0=0$ 。
由此,未来第1帧的预测完全基于
历史观测 $x$ (通过 GlobalNet 编码,见后)
确定性趋势 $\mu_1$(来自 $\mathcal{P_{\theta_1}}$)
从纯噪声开始的扩散去噪过程
最后,我们得到最终预测结果
$$ \hat{y}=\hat{r}+\mu $$全局时序UNet (GTUNet)
在随机残差预测中,作者设计了一系列详细扩散组件,其中包括:全局时序UNet(Global Temporal UNet)。
这里简单讲讲 UNet,后面有机会单开一个博客。
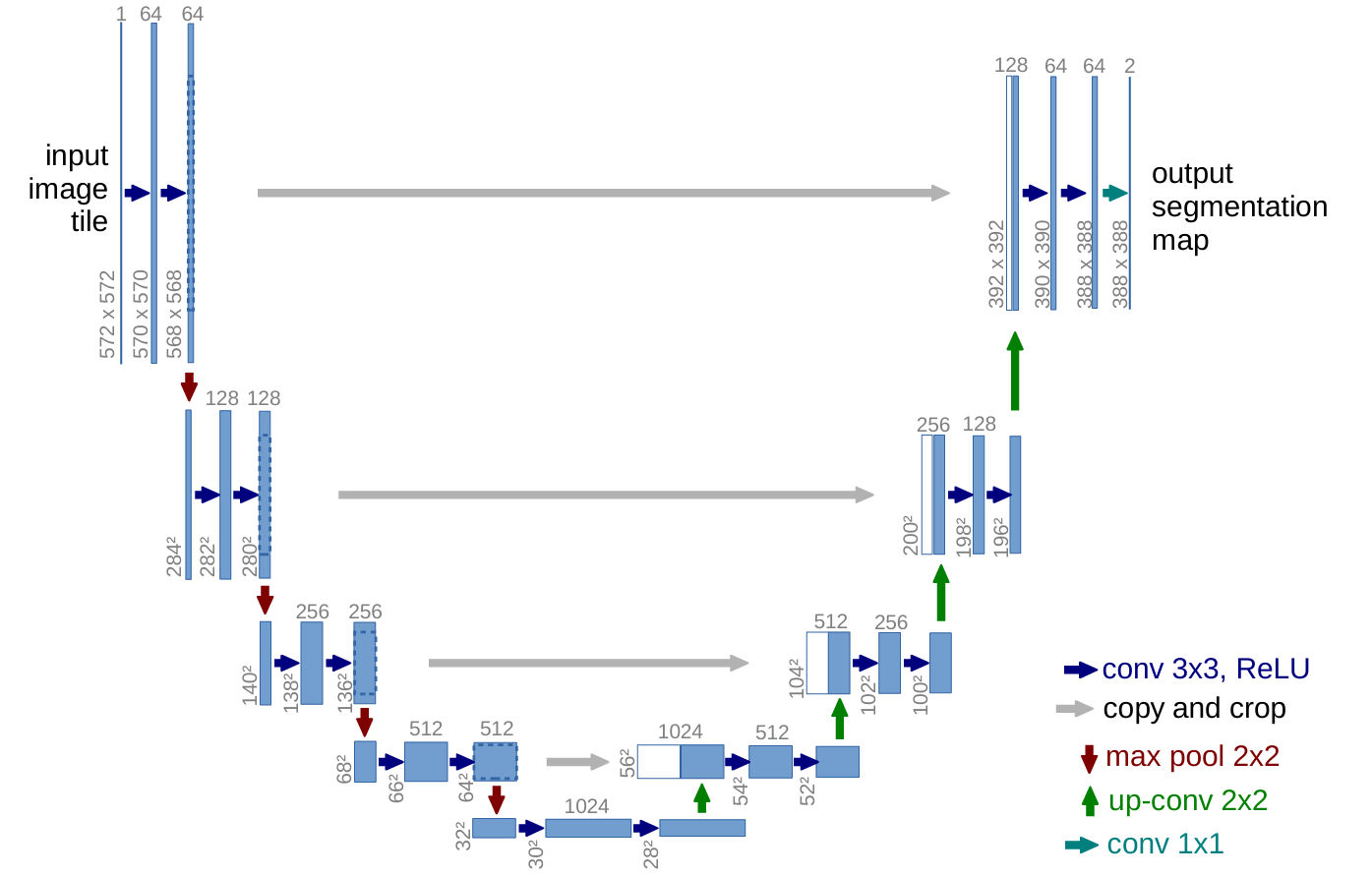
UNet 是一种编码器-解码器架构的卷积神经网络,最初用于生物医学图像分割。其核心结构由收缩路径与扩张路径组成对称的 U 形拓扑。
该架构的关键在于保留了高分辨率的细粒度特征,使得网络能够同时捕捉全局上下文与局部边界细节,在像素级预测任务中实现了高精度定位。
值得一提的是,扩散模型领域的开创性工作(Denoising Diffusion Probabilistic Models)就采用了UNet作为噪声估计网络的骨干架构。
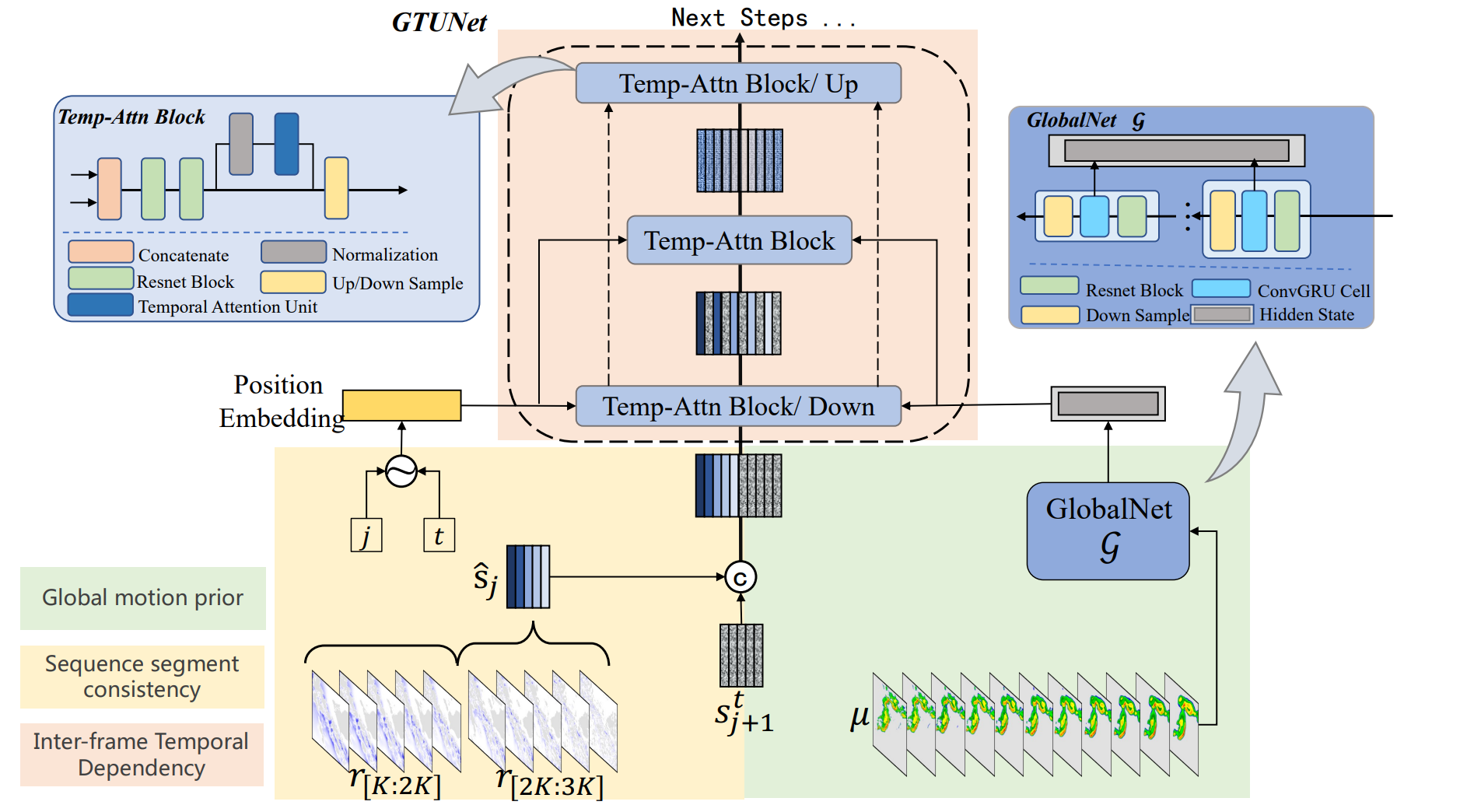
GTUNet 从多个尺度进行残差演化预测:全局运动先验(global motion prior)、序列分段一致性(sequence segment consistency)和帧间时序依赖性(inter-frame temporal dependency)
全局运动先验
如图中绿色部分所示,作者设计了一个类 ConvRNN 的结构 GlobalNet $\mathcal{G}_{\theta_3}$ ,从确定性基线预测 $\mu$ 中提取全局运动趋势信息,定义为 $h$ :
$$ h=\mathcal{G}_{\theta_3}(\mu)=\mathcal{G}_{\theta_3}(\mathcal{P}_{\theta_1}(x)) $$其中 $\theta_3$ 代表 GlobalNet 的参数。
这里解释一下什么是 ConvRNN:
ConvRNN(Convolutional Recurrent Neural Network,卷积循环神经网络)是一种将卷积神经网络(CNN)的空间表征能力与循环神经网络(RNN)的时序建模能力耦合的混合架构,专门用于处理具有时空连续性的高维序列数据(如视频帧、气象雷达回波序列)。
标准 RNN 处理图像序列时,通常将每帧展平为向量,导致空间拓扑信息丢失。ConvRNN 将状态转移矩阵替换为卷积核,解决了这个问题。
与全连接 RNN 不同的是,ConvRNN 继承了 CNN 的空间平移等变性(Spatial Translation Equivariance):输入序列中的空间模式在帧间移动时,其对应的隐藏状态特征图也会相应平移,而不会被固定到特定位置的全连接权重“锁定”。这一点在气象预测中很重要,避免了模型预设对降水系统的空间先验。
ConvRNN通过在不同时间步与空间位置共享卷积核参数,参数量得到降低,参数效率提高;同时通过堆叠多层或膨胀卷积(Dilated Convolution),可以扩大时序感受野,捕捉长程运动轨迹。
GlobalNet 的具体结构如下所示:
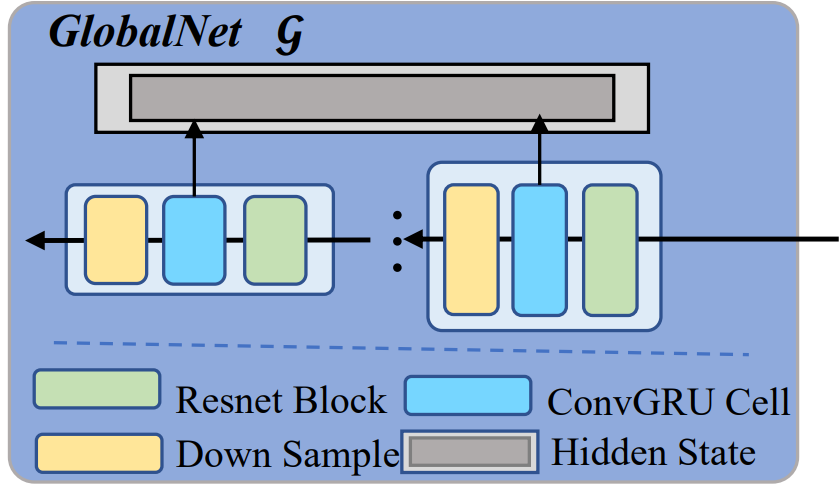
它是一个具有多个时序模块的多层架构,每个时序模块由一个下采样算子、一个 ConvGRU 算子、一个 ResNet 算子组成。
我们来看看 GlobalNet 的细节
-
输入:来自 Base Predictor 的预测结果。这是预测得到的未来帧序列,但存在模糊、细节丢失等问题。
-
目标:GlobalNet 并不修改 $\mu$ 的结果,而是提取其中的运动规律,得到一个高维隐藏状态 $h$ ,后续会提供给扩散模型。
数据输入 GlobalNet 后会经过多个时序模块(Temporal Block),每个 Block 中首先下采样,空间分辨率逐层降低,实现”在底层保留精细的空间细节,在高层捕捉大尺度的整体运动趋势“。
这里图上似乎容易让人误解,但根据实际训练流程,我们认为在一个时序模块中下采样(黄色)是最先进行的。
这里解释一下这些算子:
Down Sample(下采样)
这一步可以理解为是在降低数据的分辨率,或者更加直观,把图像变小。
每经过一个时序模块,进行一次下采样,降水图的尺寸缩小一次(例如 128×128 → 64×64 → 32×32)。
这样可以提取不同尺度下的运动规律,最后会组合成为最后的 $h$ 。
ConvGRU Cell(卷积门控循环单元)
-
CNN只能独立分析每一张图片,无法捕捉多张图像之间的时序关系;
-
GRU 是典型的 RNN,能够”记忆“序列数据的特点,但普通 GRU 通常处理一维序列,需要输入一个向量。
在这里,ConvGRU 可以结合上述两种模型的优点,它能够理解降水图像数据(卷积),学习降水系统是如何从过去移动到未来的(GRU)。
我们来看看 GRU(Gated Recurrent Unit)是如何工作的:
RNN,也就是循环神经网络,它可以说是为了处理序列数据 $\mathcal{X}=(x_1,x_2,\dots,x_T)$ 而生。标准 RNN 会通过一个递推公式计算隐状态序列 $\mathcal{H}=(h_1,h_2,\dots,h_T)$ :
$$ h_t=\phi({W_{xh}x_t+W_{hh}h_{t-1}+b}), \;\;\; t=1,\dots,T $$前面我们所说的,需要”从确定性组件的预测数据中提取的“全局运动趋势,就是这里的隐状态(Hidden State)。
从递推公式上可以看到,某个时刻 $t$ 的隐状态 $h_t$ 依赖于当前数据 $x_t$ 以及前一个时刻的隐状态 $h_{t-1}$。可以这样理解,$h_t$ 编码了历史输入 $x_{1:t}$ 的历史表征。
我们说 $h_t$ 包含了 $x_1,x_2,\dots,x_t$ 的信息,这一点可能有些不好理解。其实可以从递推公式中得到。我们简化递推函数并把 $h$ 都用递推函数写出来:
$h_t=\mathcal{F}_\theta(h_{t-1},x_t)=\mathcal{F}_\theta({\mathcal{F}_\theta(h_{t-2},x_{t-1})},x_t)=\cdots$
最后会发现,$h_t$ 仅依赖于 $x_{1:t}$ (当前与过去,与未来 $x_{t+1:T}$ 无关),而且不需要显式访问 $x_{1:t-1}$ ,因为 $h_{t-1}$ 中包含了这些信息。
也就是说,$h_t$ 是 $x_{1:t}$ 的有损压缩。它忽略了对未来预测无关的细节,保留最关键的动力学特征,也就是我们需要的全局运动趋势。
”时刻 $t$ “ 应该理解为序列中数据的次序,而不是狭义的时间点。
与传统RNN相比,GRU引入了门控机制:重置门 $\mathbf{r}_t$ (如果历史数据已经过时,把它遗忘),更新门 $\mathbf{z}_t$(新的数据有哪些值得记录,记录下来)。可以理解为,GRU对历史数据进行选择性记忆,保留大尺度平流趋势的同时,也要及时遗忘已消散的局部对流。
这里对门控的详细数学定义不详细展开,未来有机会单开文章。
Resnet Block(残差块)
这部分是一个时序模块的最后一步。一方面,它的输出会汇入全局隐藏状态 $h$ ;另一方面,还会传入下一个时序模块,继续提取更粗尺度特征。
残差块对 ConvGRU 编码的内容进行非线性变换与筛选,提取当前尺度的运动特征,并通过残差连接保护已经编码的时序信息不被过度扭曲。
标准卷积网络会有梯度消失的问题。残差连接(Residual Connection)可以解决这个问题,它的输出可以记作:
$\mathbf{y}=\mathcal{F}(\mathbf{x})+\mathbf{x}$
通过 $+\mathbf{x}$ 保证深层网络能够被有效训练,也避免已经编码的时序特征被过度平滑或扭曲。
将提取的隐状态 $h$(Hidden State)作为额外条件注入扩散模型,残差预测重新表示为:
$$ r=[p_{\theta_2}(r_i \mid \hat{r}_{i-1},h)]^{L_{out}}_{i=1} $$相应的,去噪函数变为:
$$ \epsilon_{\theta_2}(r^t_i,\hat{r}_{i-1},\mathcal{G}_{\theta_3}(\mathcal{P}_{\theta_1}),t) $$此时,前面提到的模型训练目标函数
$$ \mathcal{L}=\alpha\sum_{r_i \in r}\mathcal{L}_\epsilon(r_i)+(1-\alpha)\mathcal{L}_\mathcal{P} $$由 $(\theta_1,\theta_2,\theta_3)$ 共同参数化。
序列分段一致性
为了更好地保持残差演化的序列一致性,作者建议将残差序列 $r$ 划分为多个段 $s$ 进行预测。
有研究(MIMO Is All You Need : A Strong Multi-In-Multi-Out Baseline for Video Prediction)表明,在循环时空预测中,多输入多输出(MIMO)优于单输入单输出(SISO)。
具体示意图见前图黄色部分。我们构建分段并将第 $j$ 段(从0开始)记为:
$$ s_{j-1}=r_{[(j-1)K:jK]} $$其中 $K$ 表示每段的长度,$j=0,1,\dots,[L_{out}/K]$ 。
由此,得到 $s_j \in \mathbb{R}^{K \times H \times W \times C}$ ,扩散模型转变为对段级时序分布建模:
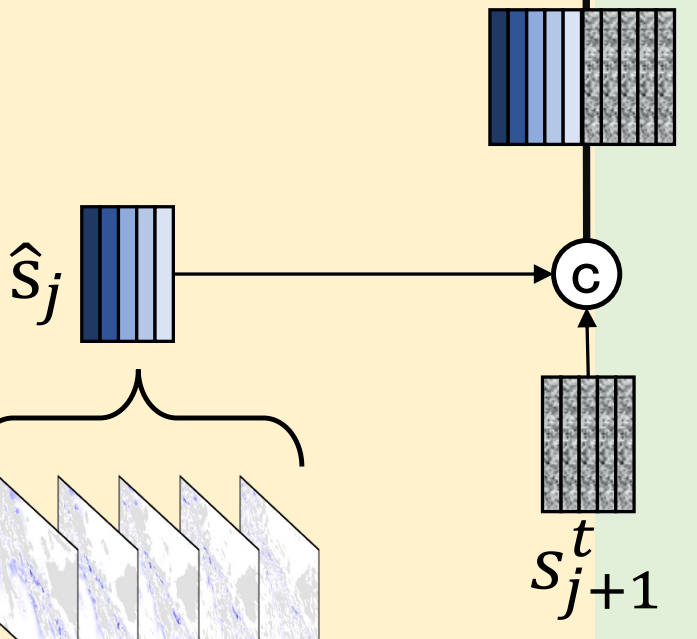
$$ s=[p_{\theta_2}(s_j \mid \hat{s}_{j-1},h)]^{\frac{L_{out}}{K}}_{j=1} $$这里的划分是人为进行的,那么预测后我们也需要人为地拼接起来。我们通过在 $t$ 步去噪状态 $s^t_j$ 与前一段 $s_{j-1}$ 之间进行通道拼接(channel concatenation)来融入段条件。
这里详细讲讲什么是通道拼接:
给定两个张量 $\mathbf{A},\mathbf{B} \in \mathbb{R}^{K \times H \times W \times C}$ (分别对应上面说的 $s_{j-1}$ 和 $s^t_j$ ),通道拼接也就是沿着最后一个维度连接:
$$ \text{Concat}(\mathbf{A},\mathbf{B}) \in \mathbb{R}^{K \times H \times W \times 2C} $$可以这样理解,我们把两张特征图拼成更厚的“千层饼”,网络可以同时看到“上一段预测了什么”和“当前段带噪状态是什么”。通过显式拼接条件,强制模型维护段与段之间的时序连贯性。
也就是示意图中这部分(段序号的标注有区别,但无大碍):
此外,随着预测提前期的增加,由于不确定性增加,残差也会不可避免地变大。因此,我们需要显式指示段的位置。在设计模型时,除了对去噪步数添加位置嵌入外,还对段索引 $j$ 添加了额外的位置嵌入。
至此,残差演化扩散模型的目标函数变为:
$$ \mathcal{L}_\epsilon=\mathbb{E} \lVert \epsilon - \epsilon_{\theta_2}(s^t_j,\hat{s}_{j-1}, \mathcal{G}_{\theta_3}(\mathcal{P}_{\theta_1}(x)),t,j) \rVert^2 $$值得一提的,和前面提到的 $\hat{r}_0=0$ 类似,在预测第一段残差 $s_1$ 时,使用 $s_0=0$
帧间时序依赖性
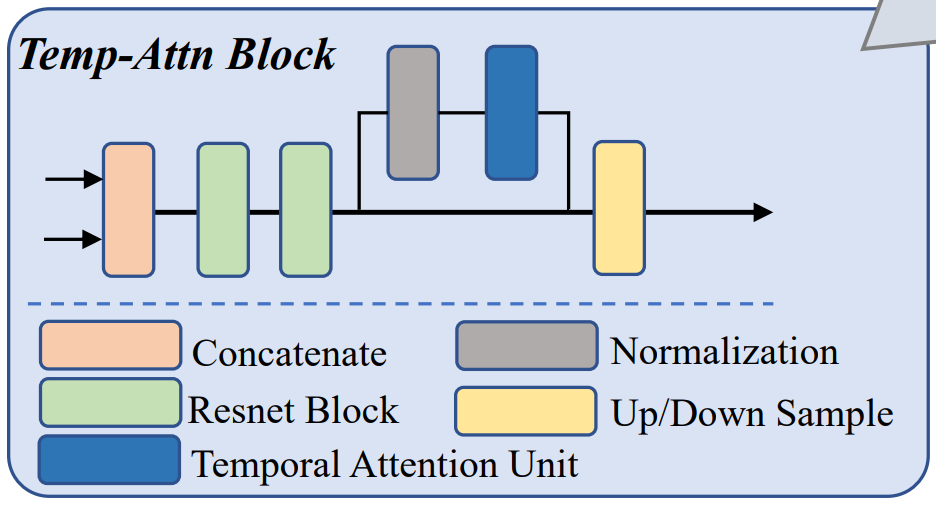
为了更好地建模段内的帧间依赖性,DiffCast 的GTUNet包含了时序注意力块(Temp-Attn Block)。实际上,它是 DDPM 中 UNet 的一种时序演化变体。
时序注意力块由拼接算子、ResNet算子、归一化算子和时序注意力算子构成。
随后,时序注意力块连接上采样/下采样算子(示意图浅橙色部分),使得段内的预测残差具有时序依赖性。
来看看时序注意力块的详细部分:(待补充)
-
Concatenate
-
Resnet Block
-
Normalization
-
Temporal Attention Unit
-
Up/Down Sample